I’ve been thinking of modifying the gripper on my Rover 5. The 2 arms that close to pick up things are pretty small. I was thinking of attaching a small plate on both sides. This would make it easier to pick up things. And the plates would give me a good surface to mount a sensor to detect if the gripper has made contact with something and to measure the pressure on both sides of the gripper.
So I started searching for pressure / force sensors. And I found a cheap solution, the piezo element. So I bought 5 on Ebay and did a small test. The piezo element has an internal resistance which changes when you apply pressure to it. When there is no pressure on the element the resistance is infinite. When I pushed on the piezo element the resistance started to drop.
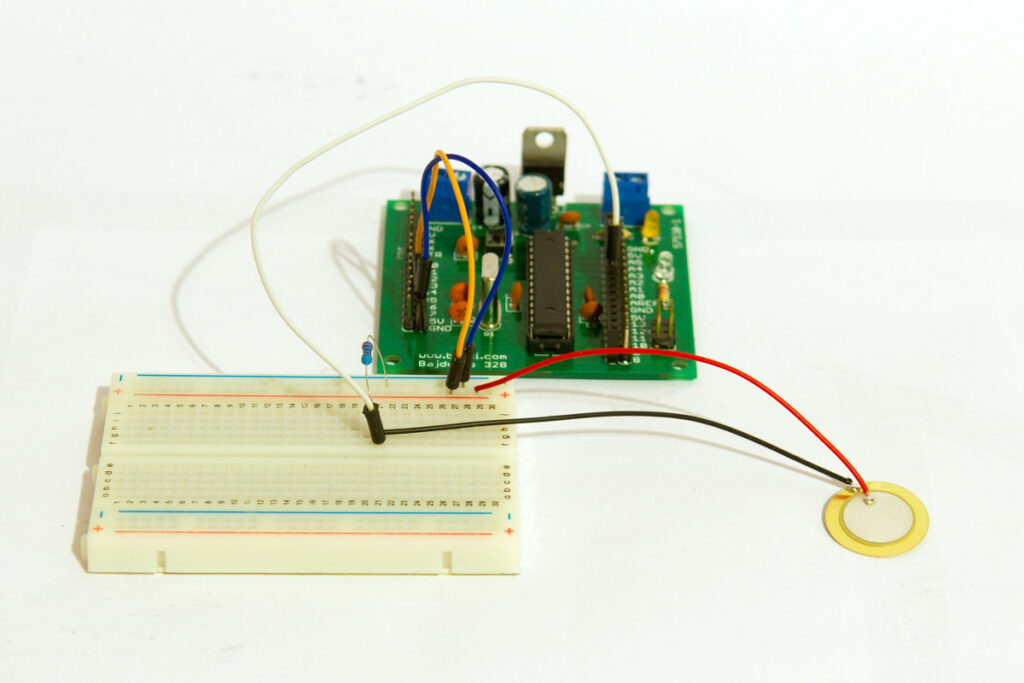
To measure the resistance with an Arduino I made a voltage divider. I connected one end of the piezo element to the 5V pin of the Arduino and the other end to an analog input. From the analog input I also connected a resistor to ground. I had to try lots of different resistors to find a value that gave accurate readings. I first started with a 10K resistor. But even when I pushed really hard on the piezo element I got a very low reading. So I tried some bigger resistors. A 150K resistor gave me the best results for the piezo elements I bought. Now I have to try and make some plates or attachments for the gripper so I can fit the piezo elements to the gripper. The sketch I used to see the analog readings is just the example “AnalogReadSerial” that comes with the Arduino IDE.
Once I experimented with these round piezos, and I found out that (you) I could cut these discs in stripes – without loosing the piezo effect.. (with a Dremel-Diamant-Disk i was able to cut them into small ‘stripes – about half a cm,
each of them needs to connect them by soldering the wires directly, to one end of the piezo strip.. – the other contact is the layer on’ which the piezo-disk is mounted on)
have fun & succsess! – Oliver
– the act of cutting: one have to have really calm fingers, and you should ‘cool the cutting area, line, with water, and a soft (!!!) movement to cut… I used them to build them into/under the ‘bridge of my acoustic guitar – to have a ‘sound pick up’.. 🙂
Oliver