Hexapod bajdupod 996R trouble
I’ve been working on my hexapod, and I’ve spent the last weeks struggling with inverse kinematics. I found a great explanation on this website. I started by measuring the parts of the legs. The legs are made of 3 parts, coxa, femur and tibia. I then copied quite a bit of code from the sketch on engineer-this. I did my best to understand how it works and adapt it to my hexapod. The inverse kinematics math is the same but I still needed to convert the IK angles to the servo angles. I used a protractor to measure the servo angles and compare them with the calculated inverse kinematics angles.
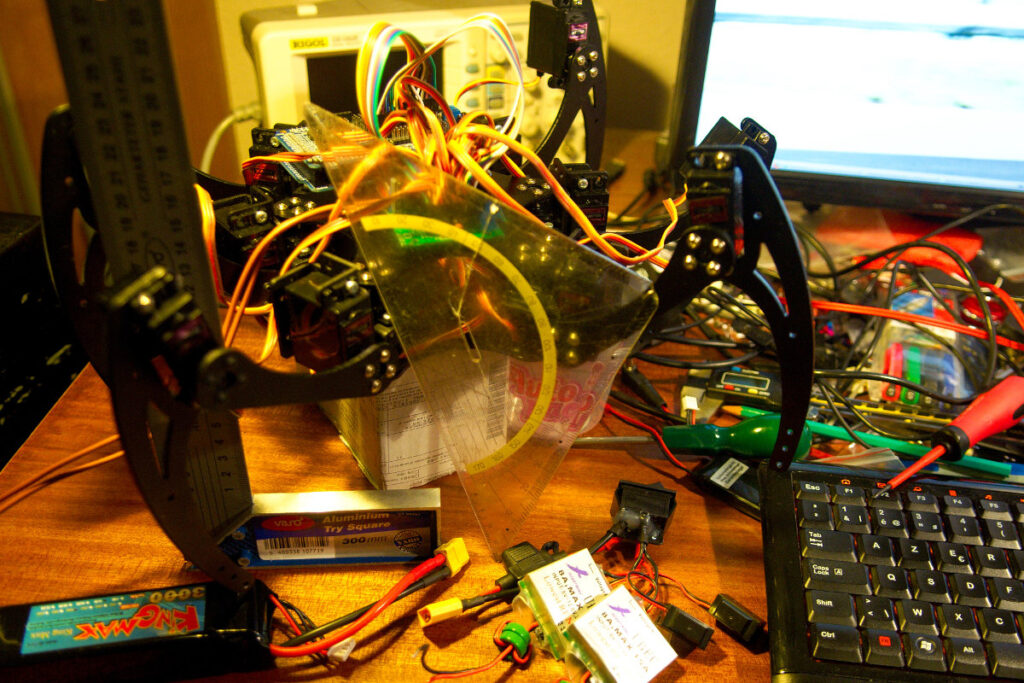
It took me some time to figure it all out, but once you managed to do it for 1 leg the other 5 legs are very easy. Yesterday I finally wrote code to move all 6 legs using inverse kinematics. I then quickly made a sketch to move all 6 legs at the same time, so I could check if all servos were working as they should.
The legs moved for a couple of seconds and then 3 legs stopped moving. I checked the voltage and measured none. One of the 2 8A UBEC’s I was using is dead 🙁 Now I did shortcut the UBEC’s when I first tried out all the servos, that was some time ago. Until now they have worked fine. I then powered the hexapod from my lab power supply. My lab power supply has an integrated amp meter and it showed almost 10A. This was with the hexapod sitting on a box so there was no strain on the legs. So I’ve decided to beef up my power supply to the servos and ordered 3 new 8A UBEC’s. Each UBEC will power 2 legs, 6 servos. I hope that’s enough. I’m powering the UBEC’s from a 3S 30C 3000mAh Lipo battery.
Can’t wait to see a video of the hexapod in action.
Same here!
Hi bajdi,
I’ve just received my chassis kit too, from aliexpress, but I still don’t know how to mount it ^^’, did you received any manual to mount yours?
Lynxmotion.com has assembly instructions posted on their site. Great source for some hard to find parts also.
I didn’t need a manual to put it together. Take a good look at the photos of mine. You just need a lot of M3 nuts and bolts.
I building the same HEX, But i’m in trouble with IK, do you have a sample of your code for only one leg ? or somthing else to help 😉 (I have already built a quadripod with 12 servos but without IK 🙁 ) THANKS
I bought:
– the same hex frame (aliexpress)
– chinese 32 channels controler (ebay)
– arduino nano mega (ebay)
– 20X996R servos (ebay)
– a lot of M3 (incredible the number of srew needed :-O around 160),
– a big regulator step down ( http://www.ebay.com/itm/181072927354?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649 )
– ball bearings (ebay)
Just wait for all of this shipped to france !
I didn’t create the IK math my self, I copied most of the code from here: http://engineer-this.com/QuadrupedVer2.txt I just made some small changes.
To be honest I would have preferred to not see that code. Figuring out these things is the most fun for me. By copying the code I didn’t learn anything.
I prefered hardware to software(in my job I don’t program), I’ll try to do something with my new chinese 32 channels servo controler and IK. Thanks for help 😉