I’ve added the top chassis plate to my hexapod. I glued 16 blue leds to it and then soldered wires to the leds. The wires are connected to 2 74HC595 shift registers. My hexapod needed some sensors so I mounted 3 small servos to it. One in the bottom plate that sweeps a SRF06 ultrasonic sensor. On the top plate I mounted a pan/tilt kit with a SR04 ultrasonic sensor and a Rocket brand studios Wiicamera. I glued another 2 blue leds to the pan tilt kit. These are controlled by 2 PWM pins. All the sensors and leds are controlled by the Seeeduino Mega, so a 16MHz 8 bit micro controller is more then fast enough to control a total of 21 servos and some sensors.
I now need to learn my hexapod some tricks based on the sensor input 🙂
Some photos:
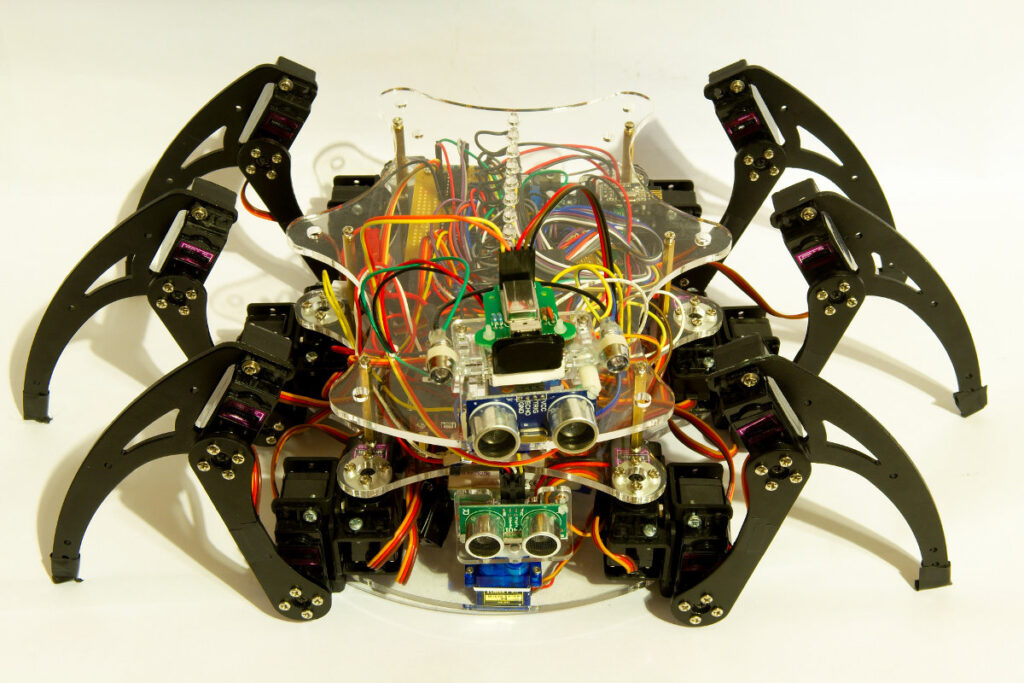
Bajdupod 996r hexapod
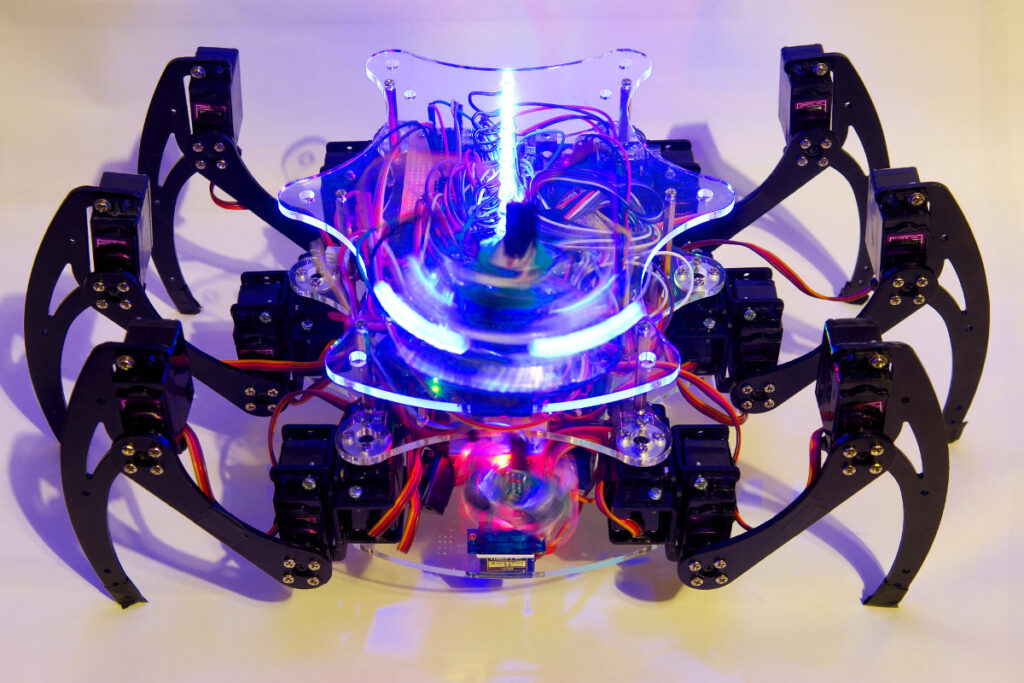
Bajdupod 996r hexapod
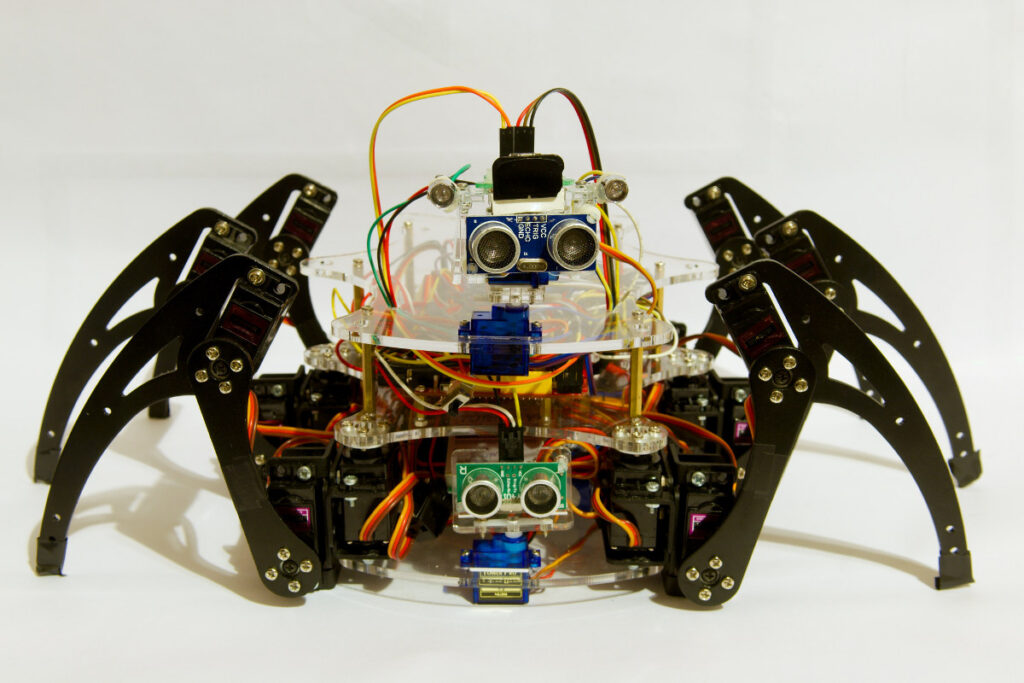
Bajdupod 996r hexapod
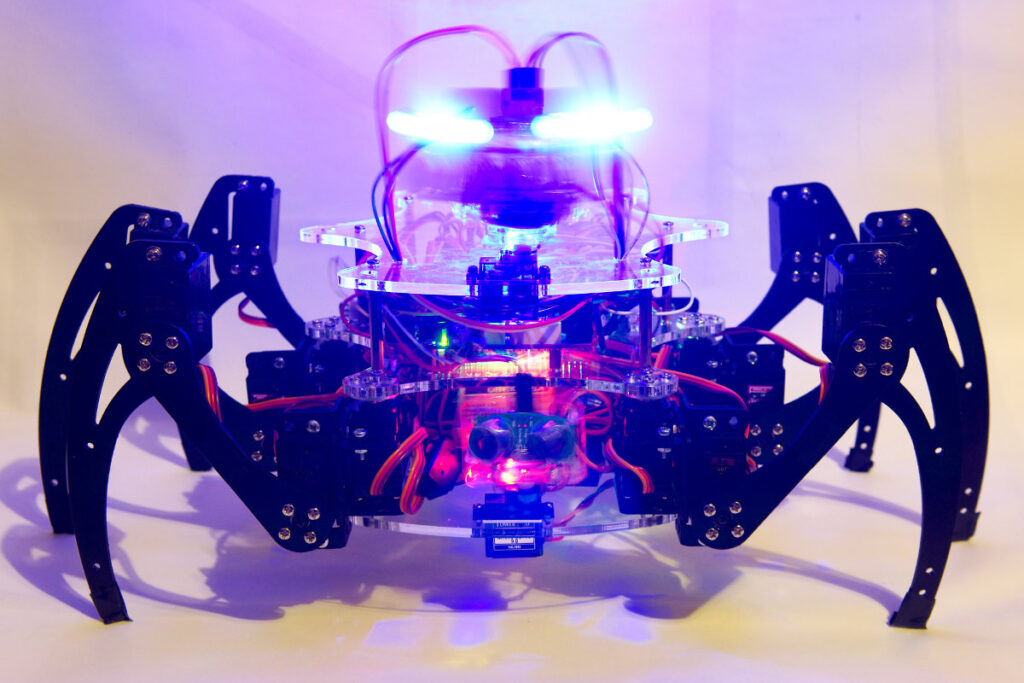
Bajdupod 996r hexapod
With reference to my previous comment on connecting ultrasonic sensors.Could you please link me the sketch with 12 sensors or with 2 ultrasinic sensors.I checked your hexapod but it had no sketch linked to it.
Regards
Just install the NewPing library, it comes with an example sketch “NewPing15Sensors”. This sketch lets you use 15 ultrasonic sensors. Take a look at this forum topic: http://forum.arduino.cc/index.php?topic=106043.0